VECTOR
Unity에서 오브젝트의 속도와 위치를 저장할 때 x, y, z 세 원소를 가지는 3D벡터인 vector3 타입을 사용했습니다.
오브젝트의 위치, 방향, 회전, 속도, 크기는 모두 vector 형식으로 저장됩니다. 따라서 vector는 Unity에서 매우 중요합니다.
이번시간에는 vector에 대해서 알아보겠습니다.
#Vector의 정의
Vector는 공간상의 화살표, 나열된 숫자 데이터 등 다양한 관점이 있습니다. 하지만 Unity에서의 Vector는 공간상의 화살표로 사용됩니다. Unity에서의 Vector는 위치, 방향, 속도를 나타냅니다.

벡터는 x, y, z에 대응 하는 세 원소를 가지고 있고 오브젝트의 위치, 방향, 회전, 속도, 크기는 모두 vector 형식으로 저장됩니다.
#절대 위치와 상대 위치
상대 좌표 : 현재 좌표의 기준
절대 좌표 : Unity 가상 공간의 기준인 좌표
만약 (1, 1) 만큼 이동한다고 하면 상대 좌표는 현 위치에서 상대적으로 어느 방향으로 얼만큼의 크기로 갈것인지 표현합니다.
하지만 절대 좌표는 Unity의 가상 공간의 원점이 (0, 0)이라고 가정하면 (0, 0)에서 x 방향으로 1 칸, y 방향으로 1칸 이동하는 좌표로서 의미를 갖는다.
#Vector의 크기
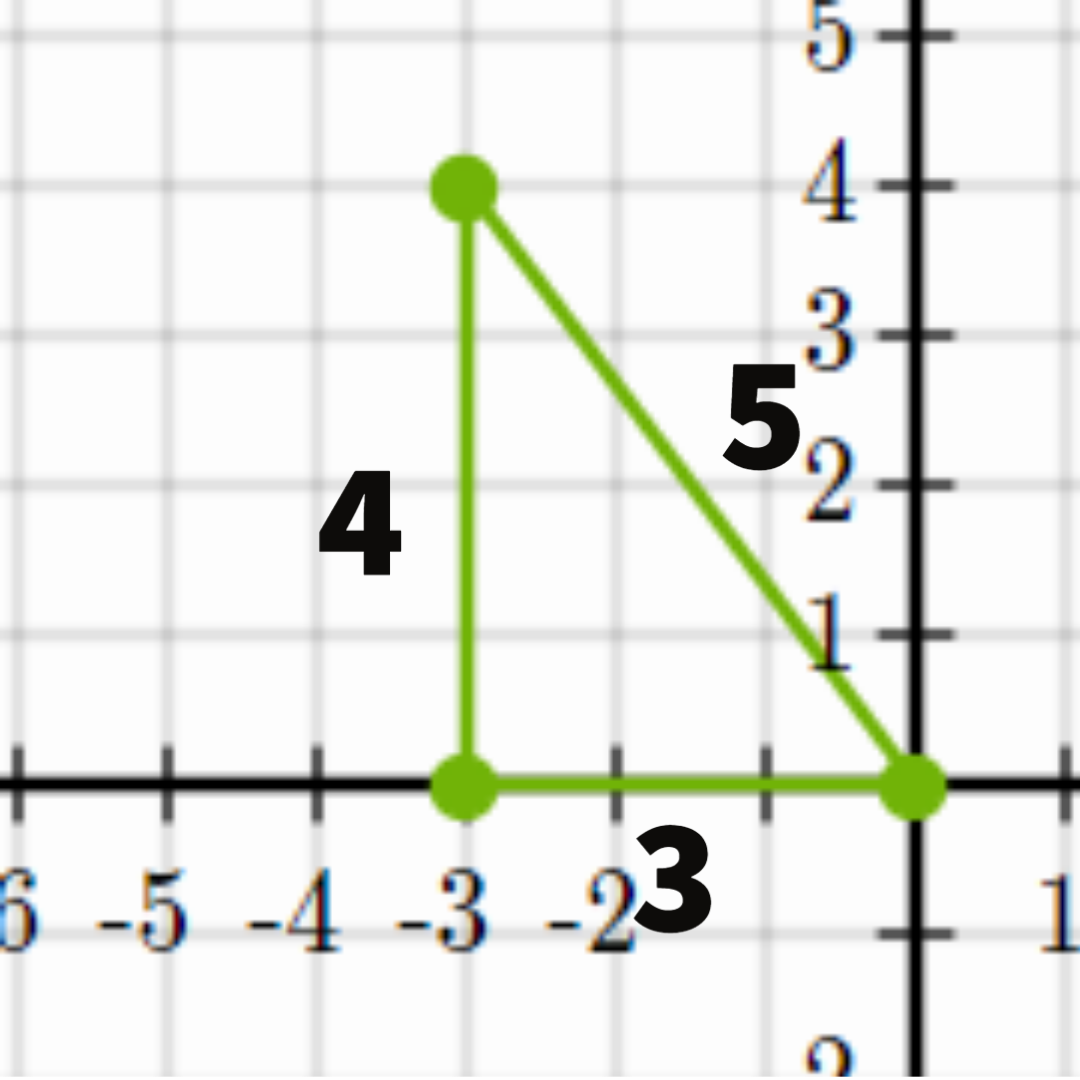
2D 벡터 (-3, 4)를 예시로 해봅시다.
(-3, 4) 의 방향은 (-3, 4)로 향하는 화살표의 방향입니다.
화살표를 빗볏으로 하는 직각삼각형의 빗변이 (-3, 4)의 vector의 크기 입니다.
피타고라스 정리를 이용하여 빗변을 구할 수 있습니다.
$$h=\sqrt{a^2+b^2}$$
따라서 (-3, 4)의 크기는 5 입니다.
- Vector의 크기는 화살표의 길이에 대응하기 때문에 음수 X
- Vector의 방향과 크기는 별개의 값
#Vector의 스칼라 곱
벡터에서 배수를 취하는 숫자를 곱하는것을 스칼라 곱이라고 합니다. 여기서 곱하는 수를 스칼라 라고 부릅니다.
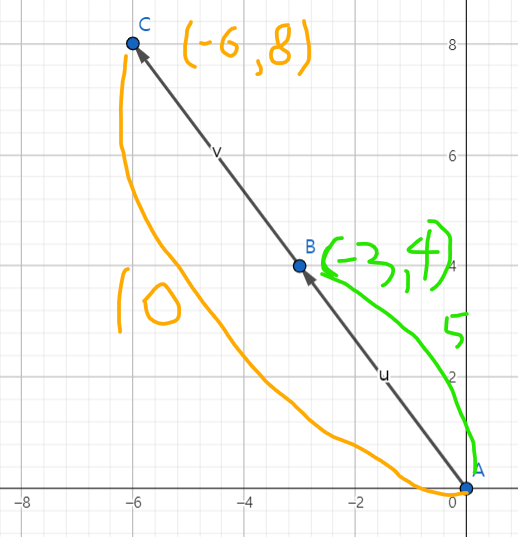
(-3, 4) 크기는 5, (-6, 8)의 크기는 (-3, 4)의 2배인 10 입니다.
(-3, 4)에다가 2를 곱해보면
2 x (-3, 4) = (-3 x 2, 4 x 2) = (-6, 8) 의 크기는 (-3, 4)의 크기의 2배인 10이다.
벡터에서 스칼라 곱을 곱하면 벡터의 각 원소에 개별적으로 곱셈이 적용됩니다.
따라서 스칼라 값은 기존 벡터를 방향은 그대로 유지하면서 길이는 늘리거나 줄이는 배율 입니다.
#Vector덧셈과 뺄셈
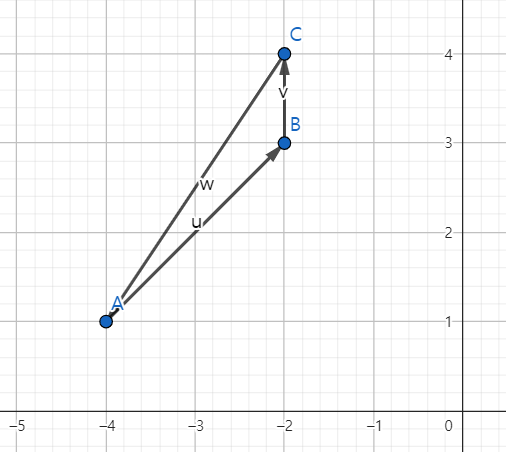
A(-4, 1)인 점에서 B(-2, 3)을 더하면 (-4, 1) + (-2, 3) = (-4, + -2, 1 + 3) = (-2, 4)
두 벡터 A와 B를 더하는 행위를 공간상에서 보면 A에서 B만큼 더 이동한다는 의미 입니다.
반대로 A와 B를 빼서 좌표의 거리를 알 수 있다.
#방향 Vector
- 크기가 1인 벡터(1,1)로 정규화된 벡터(Nornalized Vector)라고 부르기도 합니다.
- 벡터의 방향을 비교할 수 있음
만약 (3, -3)벡터가 있다면 그 벡터의 시작지점에서 반지름인 1인 원을 그랴서 바깥부분을 잘라내고 난뒤에값 (0.71, -0.71)가 됩니다.
하지만 방향벡터는 크기가 1 이어야 됩니다.
그래서 정규화를 시키면 크기가 1이 됩니다. -> 결과 : (1, -1)
#Vector의 내적
내적은 두 벡터의 곱셈 연산으로 구해지는 스칼라 값을 의미합니다. 내적을 계산할 때는 두 벡터의 크기와 각도가 중요합니다. 두 벡터 a와 b의 내적은 다음과 같이 계산됩니다.
a · b = |a||b|cosθ여기서 |a|는 벡터 a의 크기, |b|는 벡터 b의 크기, θ는 벡터 a와 b가 이루는 각을 나타냅니다. 두 벡터가 수직이면 내적은 0이 됩니다. 또한, 두 벡터가 같은 방향을 가지면 내적은 두 벡터의 크기를 곱한 값과 같습니다. 반면, 두 벡터가 반대 방향을 가지면 내적은 두 벡터의 크기를 곱한 값에 -1을 곱한 값과 같습니다.
내적은 두 벡터 사이의 각도와 크기를 고려하여 벡터의 길이를 찾는 등 다양한 계산에 사용됩니다. 예를 들어, 두 벡터가 이루는 각도를 구하고 싶다면 내적을 사용하여 계산할 수 있습니다.
#Vector의 외적
외적은 두 벡터의 곱셈 연산으로 구해지는 벡터 값을 의미합니다. 외적을 계산할 때는 두 벡터의 크기와 각도가 중요합니다. 두 벡터 a와 b의 외적은 다음과 같이 계산됩니다.
a x b = |a||b|sinθn여기서 |a|는 벡터 a의 크기, |b|는 벡터 b의 크기, θ는 벡터 a와 b가 이루는 각을 나타냅니다. n은 두 벡터에 수직인 벡터를 의미합니다. 따라서 n은 a와 b가 이루는 평면의 법선 벡터입니다.
외적은 두 벡터 사이의 각도와 크기를 고려하여 벡터의 방향과 크기를 찾는 등 다양한 계산에 사용됩니다.
#유니티 C# Vector
이제 Unity에서의 Vector를 알아보자
#Vector 타입
Vector 3 a = new Vector(0, 0, 0,) //(x, y, z) 벡터 생성
a.x = 20; //(20, 0, 0)
a.y = 10; //(20, 10, 0)
a.z = 1; //(20, 10, 1)
- 유니티에는 Vector2, Vector3, Vector4 를 지원함
- Vector구조체로 선언되어 있으며 Vector3에는 x, y, z가 float형으로 있다.
#Vector 연산
#스칼라 곱
Vector3 vec = new Vector3(1, 2, 3)
a = a * 10; //a(10, 20, 30);#Vector의 덧셈과 뺄셈
Vector3 + Vector3; //덧셈
Vector3 - Vector3; //뺄셈#Vector의 정규화
Vector3.normalized;
#Vector의 크기
Vector3.magnitude;#Vector의 내적, 외적
Vector3.Dot(a, b); //내적
Vector3.Cross(a, b); //외적#Gimbal Lock

Unity에서 짐벌락은 3D 공간에서 오브젝트의 방향을 나타내는 Euler 각도를 사용할 때 발생하는 문제입니다. 이 문제는 선형대수학에서 사용되는 회전 행렬의 불안전성과 관련이 있습니다.
#Quternion
쿼터니언은 4차원 벡터(x, y, z, w)로 표현되어서 사원수라고도 부릅니다. 이 벡터는 3차원 공간에서의 회전 축(axis)과 회전각(rotation angle)으로 구성됩니다. 즉, 쿼터니언은 3차원 공간에서의 회전을 4차원 공간으로 확장시킨 것입니다.
Unity에서는 쿼터니언을 사용하여 오브젝트를 회전시킵니다. Unity의 Transform 컴포넌트에는 rotation 속성이 있습니다. 이 속성은 쿼터니언 값을 가집니다. 오브젝트를 회전시키기 위해 rotation 속성을 변경하면 됩니다.
쿼터니언은 회전에 대한 여러 가지 이점을 제공합니다. 예를 들어, 쿼터니언은 회전의 순서를 고려하지 않으므로 회전이 뒤섞이는 문제를 해결할 수 있습니다. 또한, 쿼터니언은 오일러 각도(Euler angles)보다 계산이 더 빠르고 정확하며, gimbal lock 문제를 방지할 수 있습니다.
https://product.kyobobook.co.kr/detail/S000001810471
레트로의 유니티 게임 프로그래밍 에센스 | 이제민 - 교보문고
레트로의 유니티 게임 프로그래밍 에센스 | 독자분들로부터 수많은 찬사를 받았던 유니티 대표 도서 『소문난 명강의:레트로의 유니티 게임 프로그래밍 에센스』가 개정판으로 돌아왔습니다!
product.kyobobook.co.kr
이 책을 보면서 공부한 내용들을 정리하였습니다.
'프로그래밍 > UNITY' 카테고리의 다른 글
| [Unity] UI Toolkit 커스텀 토글 (0) | 2023.10.24 |
|---|---|
| [Unity] Timeline (0) | 2023.08.05 |
| [Unity] State Machine을 이용한 FSM (4) | 2023.04.18 |
| [Unity] Mathf 클래스 (0) | 2023.03.28 |
| [Unity] 유니티 애니매이션 블렌드 트리 (0) | 2023.03.11 |
